Linear Puncher, QVEX Robotics '23-'24
Note: This project is still under development!
A rack-slip-gear mechanism actuated by a vex motor designed to pack a punch!
Introduction
I joined the Queen's Vex Robotics Team as a shooter subteam member for the '23-'24 school year. The whole point of the shooter subteam is to design a mechanism that fires a plastic 'tri-ball' (AKA Acorn) across the field towards a target. The acorn looks like this:
The acorn is around 120g and has a corner to corner length of about 6 inches for some perspective.
Design Process
As an entire subteam, we first had to decide which type of mechanism to use to shoot the acorn. SInce we had a subteam of 5 people, we had the resources to prototype different mechanisms and we would pursue the one that looked the most promising. The two main ones that we split our attention towards were linear puncher and catapult. I was apart of the linear puncher subteam and was involved with helping to design the mechanism. Below documents our iterated efforts on the linear puncher side of things.
Version 1
V1 was more of a proof-of-concept thing over anything, and we wanted to see how the mechanism would work and what possible problems we would have to address in future iterations. I cadded a simple mechanism in Solidworks that features 3D-printable components. A rack, slip gear and housing frame were printed and assembled. We also needed a motor (I had an extra NEMA 23 stepper from one of my other projects) and some rubber bands to pull the rack back to its 'home' position once the gear slipped. Here is what V1 looked like in motion:
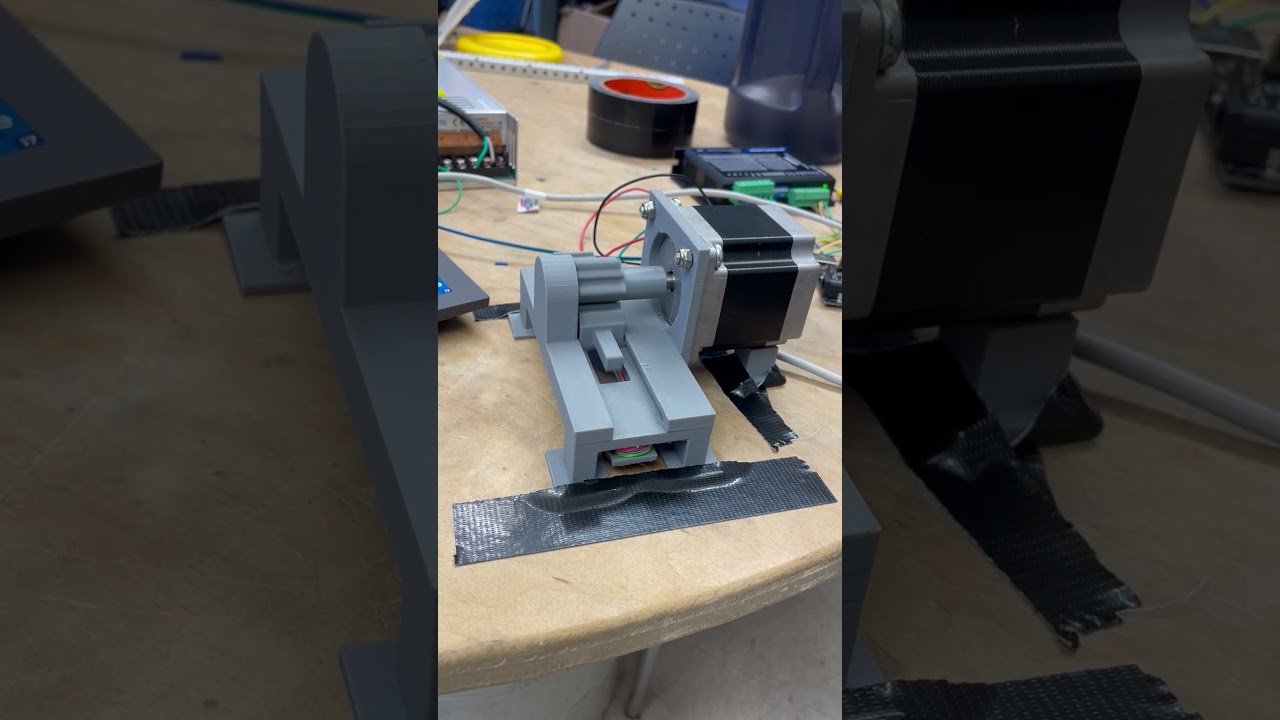
This prototype was useful because it made some important issues pretty obvious:
- There is a collision between the rack and the housing that transfers a great deal of energy into the housing. A dampening material would be ideal for receiving the rack and efficienciently and safely transferring energy into the housing. Also having a more sturdy housing frame would be nice.
- The fixtures that the rubber bands wrap around have to be strong because they also are exposed to a good deal of force. I didn't snap a photo of it but the fixture on the rack that holds the elastic bands sheared off sometime after this video. I used a pretty high infill on the printed rack with a PLA+ filament, which meant that we probably needed a stronger fixture point made out of aluminum or steel to prevent any unwanted failure
- Where is the acorn going to be? In this video the acorn would have to be at the front of the mechanism, which would mean we would need another six inches on the front for an acorn mount. This would be inefficient space-wise. Linear punchers in general are typically very long along the rack's axis of translation, so in order to prevent the mechanism from getting too long it would be more effective if we could somehow mount the acorn on top of the rack. This will become more clear when you see the later versions.
Version 2
With some good insight from V1, we went back to the drawing board for V2. We tried to implement as many changes as possible from V1, including adding a rubber stopper on the track housing to try and absorb some energy from the fast-moving rack, using an aluminum frame instead of a 3D-printed one, and making some other changes.
The acorn would sit somewhere on the pink frame and hit the L-brace. The elastics would also be wrapped around the L-brace.
The new idea was to have the rack and slip gear be below the contact point of the acorn so this part of the mechanism was kind of out of the way.
We also used a vex aluminum slide as a frame for the rack. The 3D-printed rack had heated inserts so a strong connection could be made between the aluminum slide and the 3D-printed rack.
This design looked pretty promising and we were pretty excited to test it out. Here is the video of our first attempt:

So much for the rubber stopper idea...
The problem with V2 was that the 3D-printed plastic housing was taking too much force from the rail. This was causing it to fail given PLA's relatively low Young's modulus, in spite of the rubber stopper being in the way. We decided that the best course of action would be to somehow transfer the force from the rack into the aluminum frame, because the aluminum would likely handle the force better.
Version 3
For V3 we did something kind of dumb and stretched a rubber VEX U flex wheel into a C-channel and fastened that to the front of the puncher. This way, some of the force would be absorbed by the flex wheel, and the rest hopefully by the aluminum housing frame. This is what the new V3 front looked like. The grey piece is the rubber flex wheel.
To start, it seemed like the new front attachment was absorbing the force pretty well. Below is a video we got of the puncher with 14 thick rubber bands.

The problem with the V3 front design was that consistent loading to the front frame caused gradual failure in the L-brackets. After a while it looked like this.
This is something we planned to address in V4, as well as creating a proper mount for the acorn to sit on as well as a more substantial 'whacker' that would hit the acorn. Here is what a punch actually looks like with V3.

Version 4
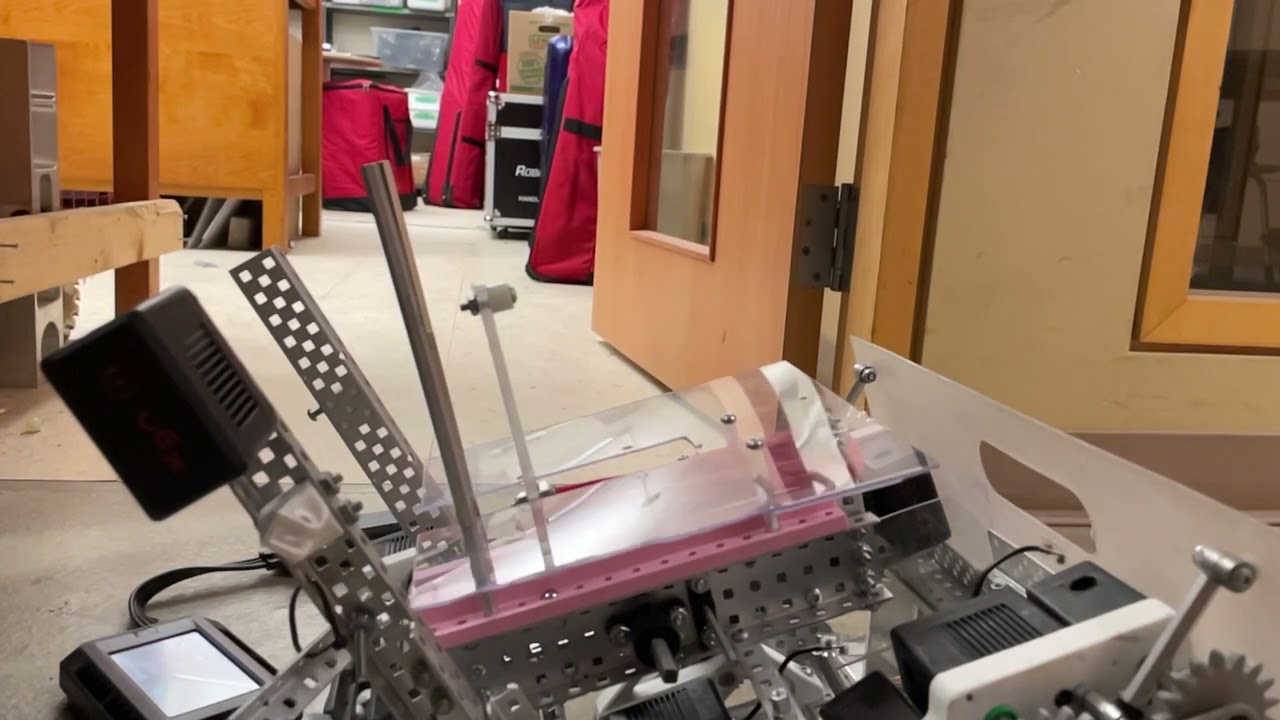
Here is our current LP version, V4. The basket was designed by our great team lead, Patrick, and ensures the acorn will be oriented properly so good contact can be made between it and the whacker.
It solves some of the problems we were facing earlier. First, we increased the rack torque by adding a reduction using herringbone gears, just so we could add more bands to get more force in the acorn if needed.
Next, we added a new front plate with a TPU insert to absorb the rack's momentum. So far this has held up, but we will see if it works long term. This design transfers the energy to the aluminum frame a lot better and has little possibility of yielding in any way. The TPU insert is the pink piece in the picture below.
Last, it features a new whacker. I wanted to explain how we came to this odd looking, yet effective design.
We started with something that looks like this. We machined an L-bracket out of aluminum and mounted it to the rack, and then laminated a recutangular bar on the back of it.
The problem with this is that the area moment of inertia of the plastic/aluminum bars were not large enough to prevent deflection when they were loaded with the acorn force. As a consequence of this, a good portion of the kinetic energy went into the bar itself to deform it, where ideally all of it would be transferred into the acorn. There is a great video of this below using a Lexan plastic bar. It deflects like crazy!
After the Lexan piece we tried using an aluminum sheet instead to see if the greater Young's modulus of aluminum would prevent deflection. We noticed that it seemed to not be deflecting as much at first, but after several tests it was clear that the aluminum was permanently deforming. It looked like this after a while:
To solve this problem, we had to increase the area moment of inertia of the cross section of the bar. We did this by laminating a second bar on the back of the first one, separated with the spacers. The transformation looked something like this:
I thought it would be interesting to see how much less deflection we would see if this change was made. Using the parameters from the photo below, we calculated that the area moment of inertia would be 56 times greater if we we to make the above change. Accordingly, this would result in 56 times less deflection, as deflection is inversely proportional to area moment of inertia.
That is basically all for now! We have our first competition on January 20th and hopefully I will be able to capture some footage of the puncher in action. For now, here is what the finished project looks like on the robot. The team has been working super hard to put everything together and I think we've put together something pretty cool so far. Here are the robots (still a work in progress) as of now!
Takeaways
Working on this project has been super rewarding for me. The most important takeaways I have had so far are:
VEX is really fun - I never did VEX in high school and I regret it. Not only are you able to put together some pretty interesting designs, but more importantly for me I have been able to connect with a lot of great people. My teammates have given me exposure to a lot of new great ideas and new ways of thinking about robotics and mechanical design, which I am thankful for.
Subteam communication is crucial - It is important to know what other subteams are working on and how they will interface with your designs. There were a couple of times where we weren't really sure how long or tall we could make the puncher because we didn't know how big the acorn intake would be. Also, we weren't quite sure how to connect the puncher to the actual frame at first. By meeting with other subteams we were able to ensure that our different robot parts would eventually fit together.